Systemet besto av en ubemannet moderfarkost (USV) utstyrt med en undervannsrobot (ROV) for undervannsoperasjoner, og en flyvende drone (RPAS) for luftoperasjoner. Moderfarkosten skal reise mellom forskjellige havbrukslokaliteter og sin landbase. Prosjektresultatene viser at: inspeksjonsoperasjoner ved oppdrettsanlegg kan utføres mer systematisk og mer autonomt; (2) bemanning på oppdrettsanlegg kan reduseres, spesielt ang. inspeksjonsoperasjoner; og (3) flere av inspeksjonsoppgavene kan fjernstyres og flyttes til landoperasjonssentre. På grunn av dette har Artifex-resultatene ført til utviklingen av nye produkter og tjenester som muliggjør ubemannet drift i havbruk, og dermed minimerer risikoen for personell, samt utvider værvinduet for drift på eksponerte anlegg. Elementene i Artifex-plattformen kan fungere i krevende miljøforhold der bølger, strøm og vind interagerer med fleksible flytende strukturer, noe som gjør den relative bevegelsen mellom Artifex-plattformen og strukturene svært vanskelig å forutsi.
Prosjektet ble fordelt i 5 forskjellige arbeidspakker (AP):
AP1, Farkostdesign og ombordutstyr
Kravspesifikasjonen til Artifex-systemet ble definert tidlig i prosjektet og en katamaransskrogform ble valgt siden den tillater ROV-sjøsetting gjennom en låsbar moonpool skapt mellom de to skrogene. En geometrisk modell av fartøyet ble laget for å analysere sjøegenskapene til katamaranen, samt oppnå best mulig plassering av fartøysystemer og ombordsutstyr. Prototypene til Launch-And-Recovery-Systemene (LARS) for ROV og RPAS ble også utviklet. LARS-operasjonene ble dessuten definert og simulert i sjøtilstander som kan oppstå på eksponerte havbruksanlegg langs norskekysten.
AP2, Autonome systemer og operatørinteraksjon
Artifex-systemet sine oppgaver ble definert og analysert med SEATONOMY-metoden. Analysen fastsatte retningslinjer for hvordan de forskjellige elementene i Artifex skal samarbeide, inkludert retningslinjer for operatørinteraksjon. Et fjernkontrollrom ble bygget av Maritime Robotics, utstyrt med en simulator og alt nødvendig for å sette operatøren i stand til å ta riktige avgjørelser og beslutninger under forskjellige forhold, spesielt de regnet som mest stressende. Prosjektet utviklet også løsninger for banefølgning og bevegelsesstyring av moderfarkosten, med hensyn til samspill mellom de tre enhetene som omfatter Artifex. Dessuten ble det utviklet metoder for å inspisere oppdrettsanlegg og gjenkjenne anleggets strukturgeometri fra lufta ved bruk av RPAS.
AP3, Luftoperasjoner
Innen Artifex-prosjektet ble det utviklet et system for håndtering av tether mellom moderfarkosten og RPAS. Navigasjons- og bevegelseskontrollsystemer for RPAS ble utviklet og integrert i Artifex-plattformen basert på standard programvare for ubemannede droner. Dessuten undersøkte prosjektet algoritmer for å skape mosaikker fra RPAS-bilder tatt over et havbruksanlegg. Hensikten med mosaikkene var å muliggjøre fjerninspisering av anlegget med et detaljnivå som gjør det mulig å oppdage avvik og endringer i strukturtilstanden.
AP4, Undervannsoperasjoner
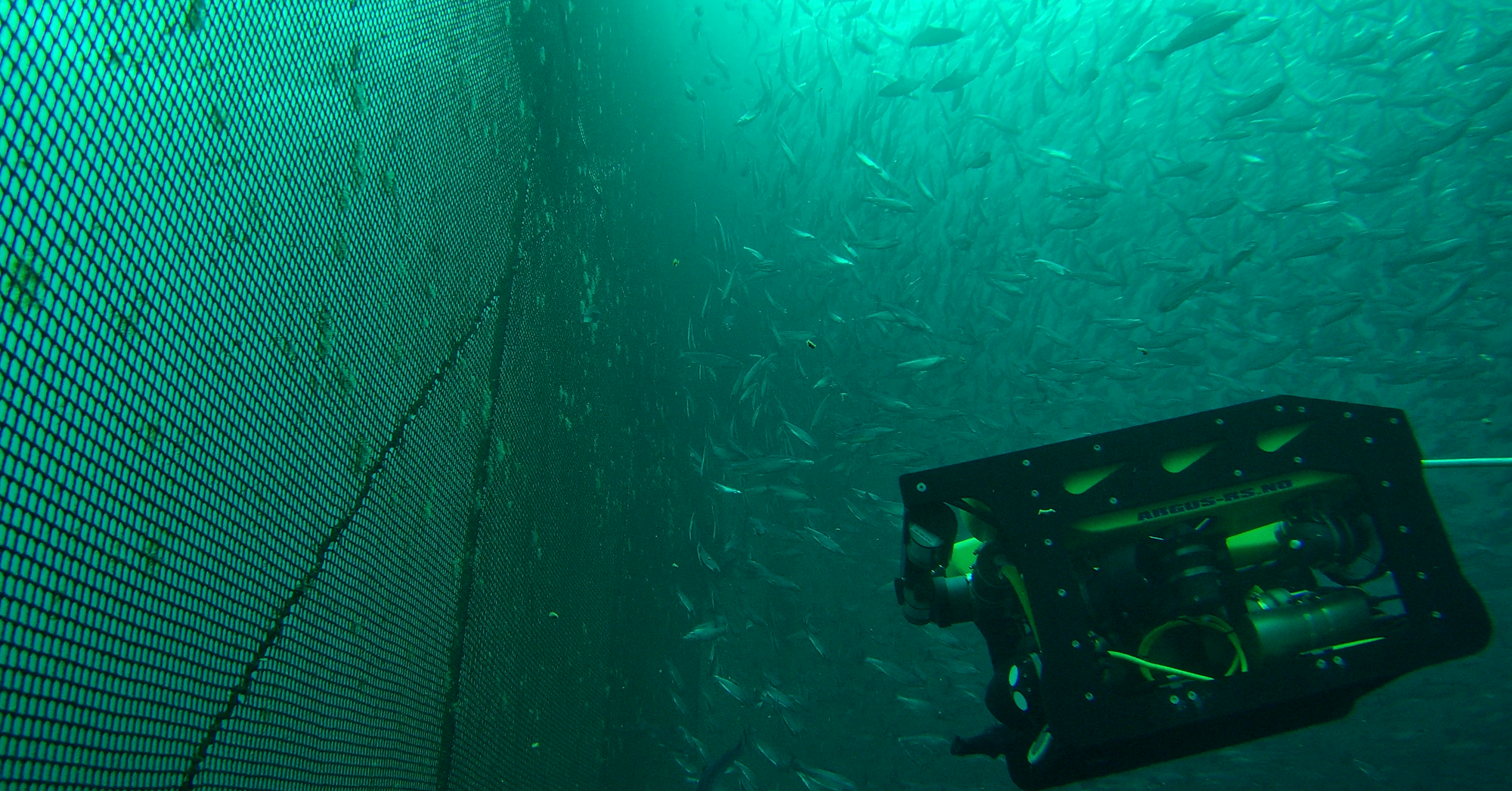
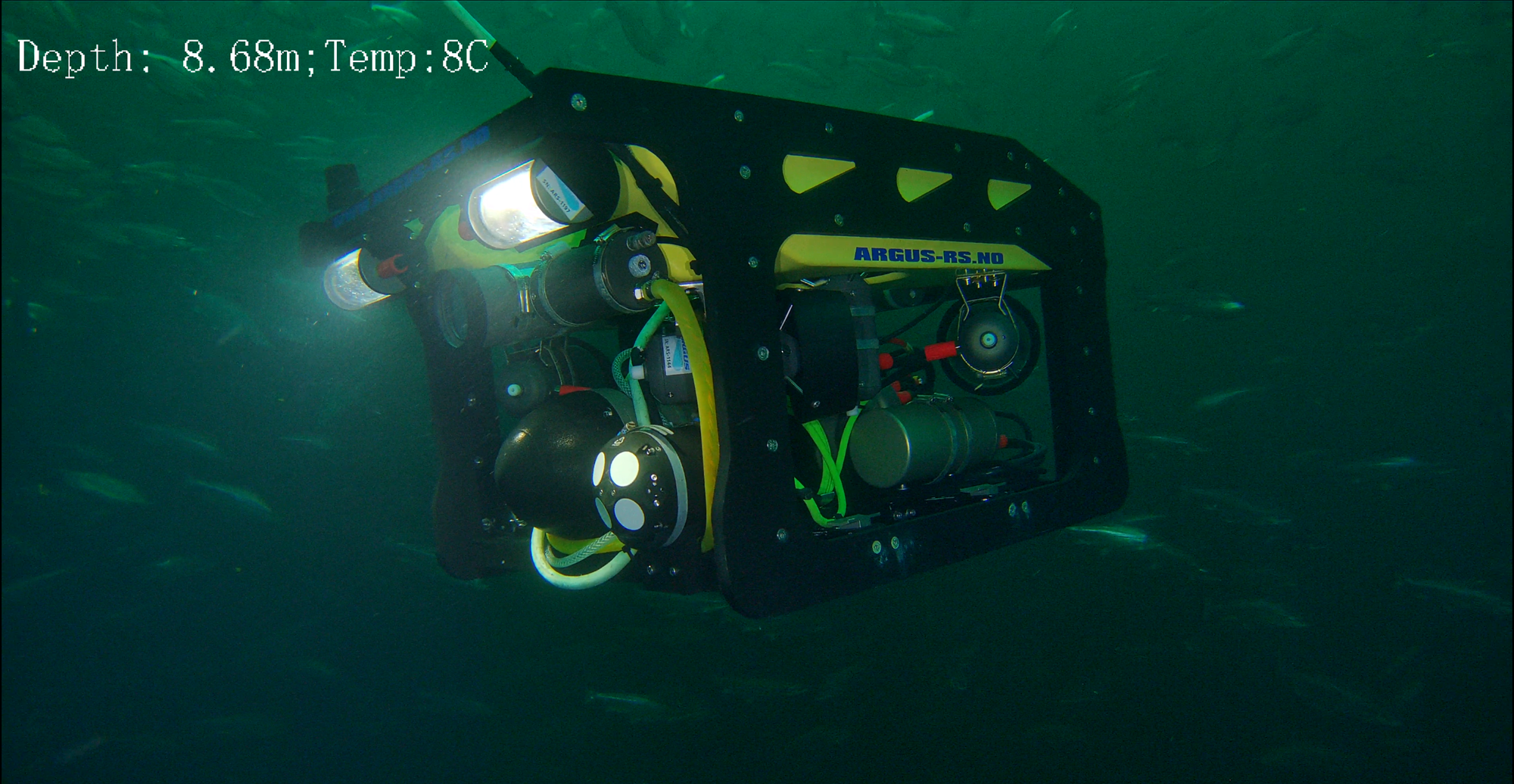
Et navigasjons- og bevegelseskontrollsystem ble utviklet for sikker og nøyaktig navigering og kontroll av ROV for undervannsoperasjoner på havbruksanlegg, dvs. utføring av inspeksjonsoperasjoner, intervensjonsoperasjoner og sikker LARS. Artifex oppnådde et høyt nivå av autonomi for navigasjon i havbruksanlegg med minimale krav til operatørinteraksjon. Det ble også utviklet et kontrollsystem for håndtering av tether mellom USV med ROV ved hjelp av en automatisk vinsj.
I tillegg utviklet prosjektet simuleringsverktøy for å identifisere sjøtilstanden som er nærmest operasjonsgrensene til ROVens kontrollsystem. Hensikten var å teste og validere kontrollsystemet i krevende miljøforhold med simuleringer. Videre bidro Artifex-prosjektet til utviklingen av en undervannsmanipulatorarm som muliggjør fjernstyring av lette undervannsintervensjonsoppgaver innen havbruk med bruk av ROV.
AP5, Testing og validering
Det ble utført to valideringsaktiviteter: den første omfattet luft- og undervannsoperasjoner på havbruksanlegg, mens den andre omfattet validering av ROVens LARS. Det ble vist at det er mulig å utføre fullstendige fjernstyrte og delvis autonomiserte inspiseringsoppgaver på havbruksanlegg, over og under vann med bruk av droner og ROV. ROV LARS ble montert på en katamaranprototype og ble testet ved kai.